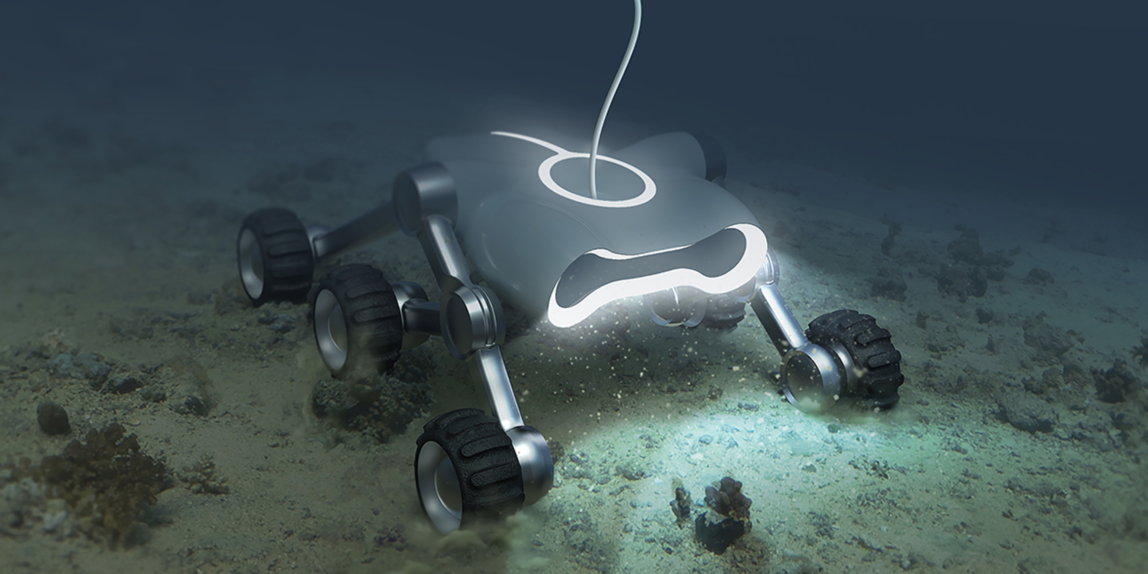
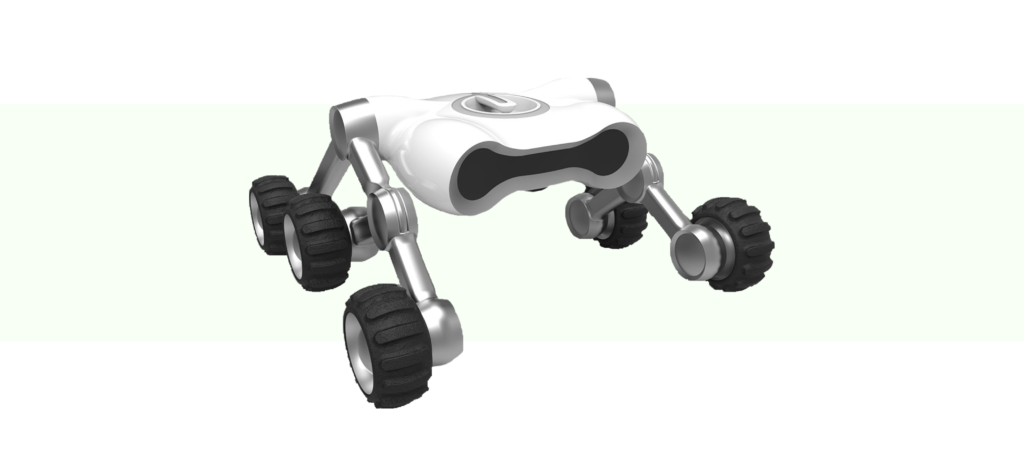
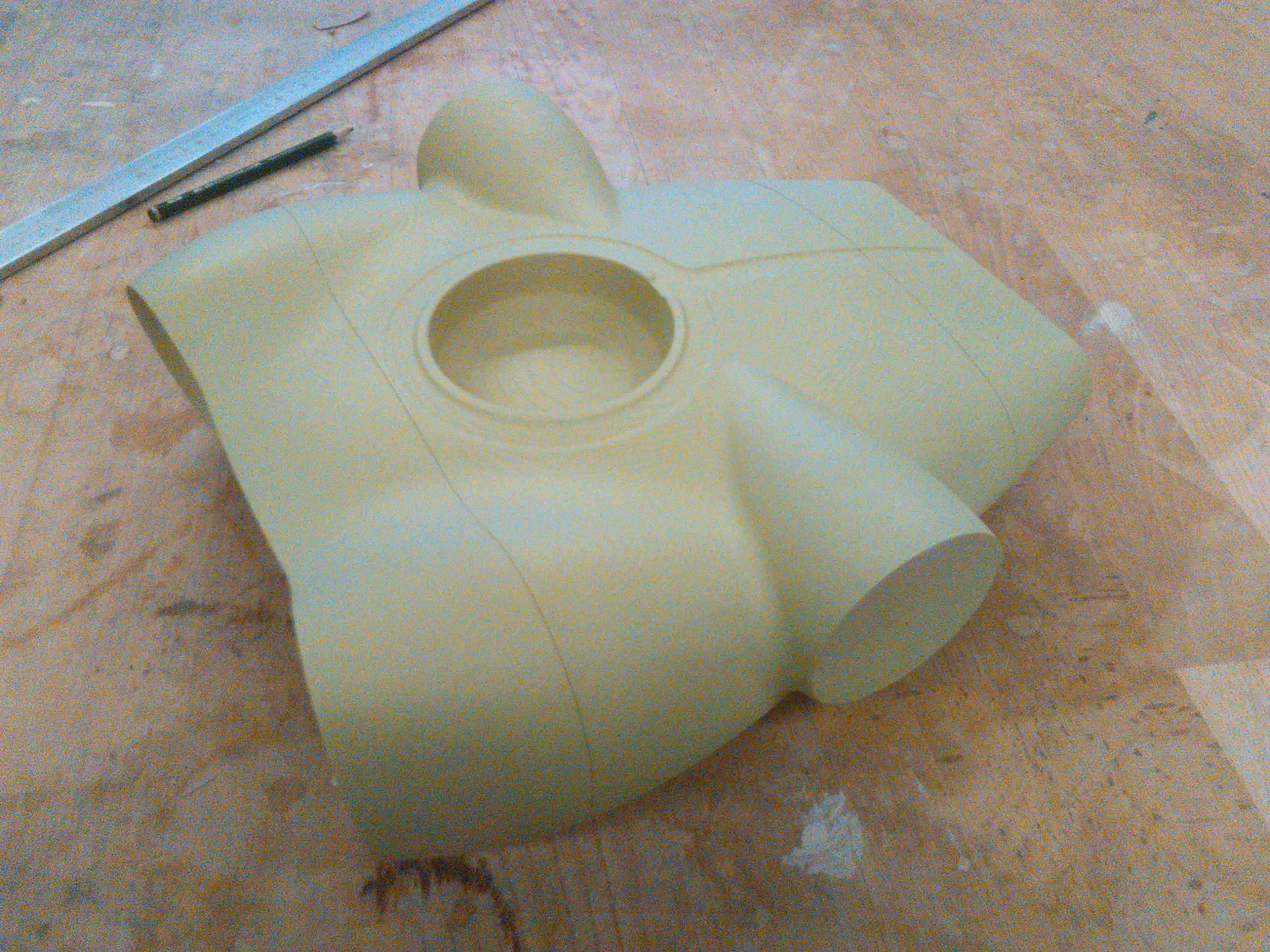
Final Design 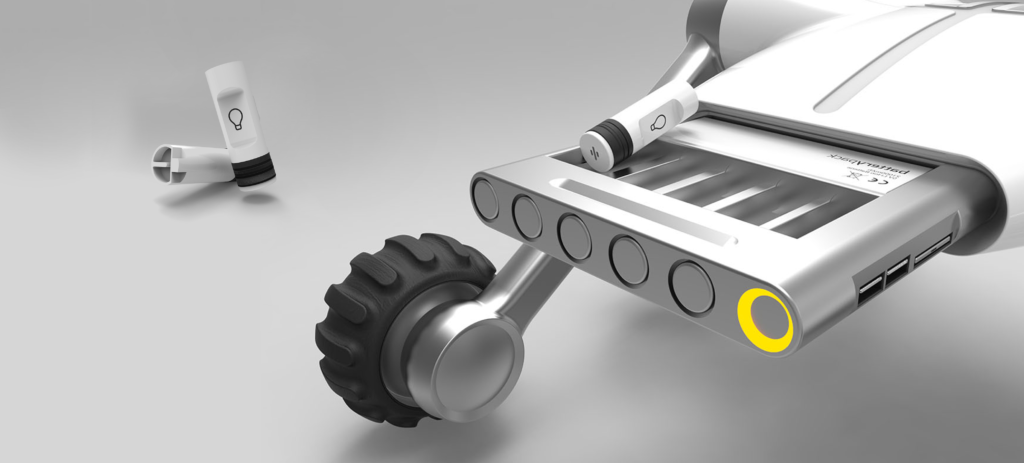
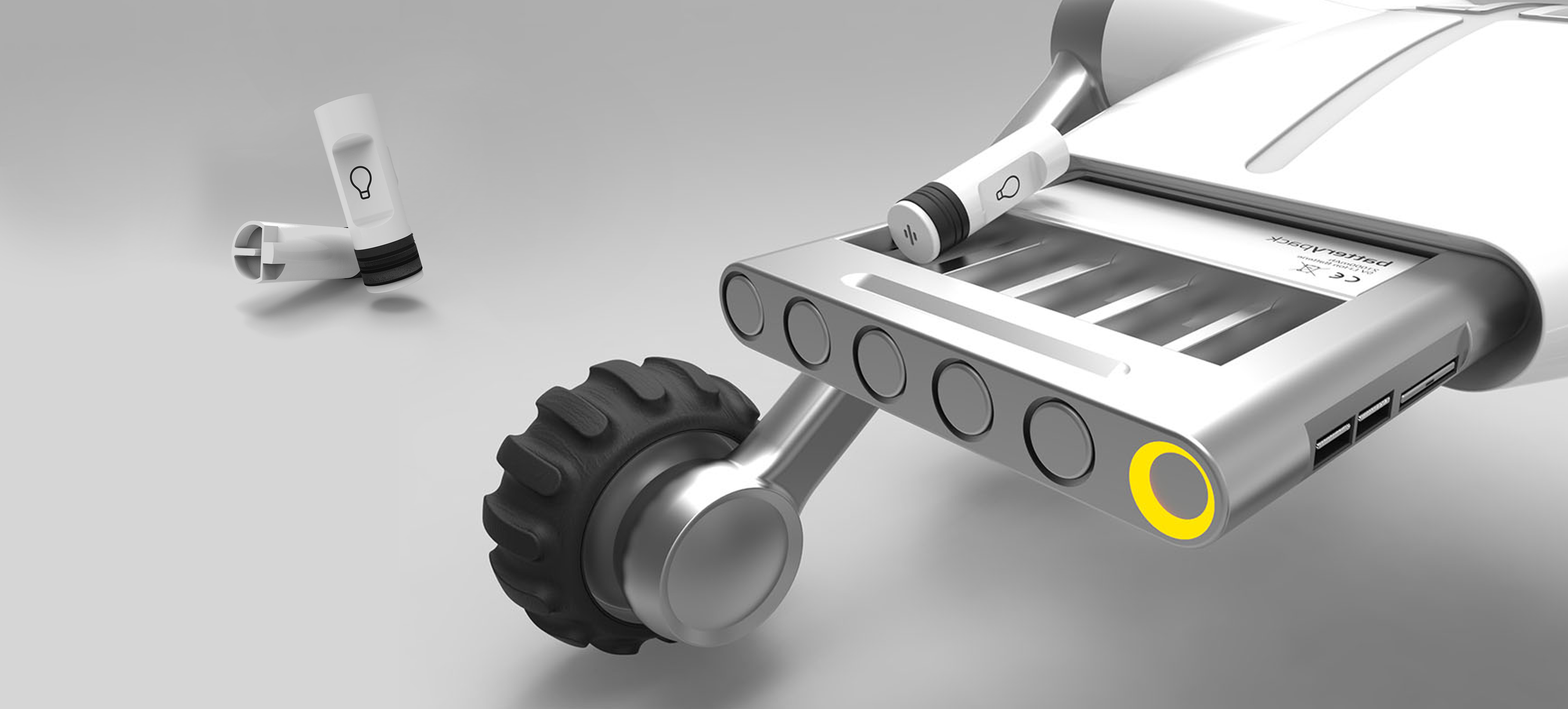
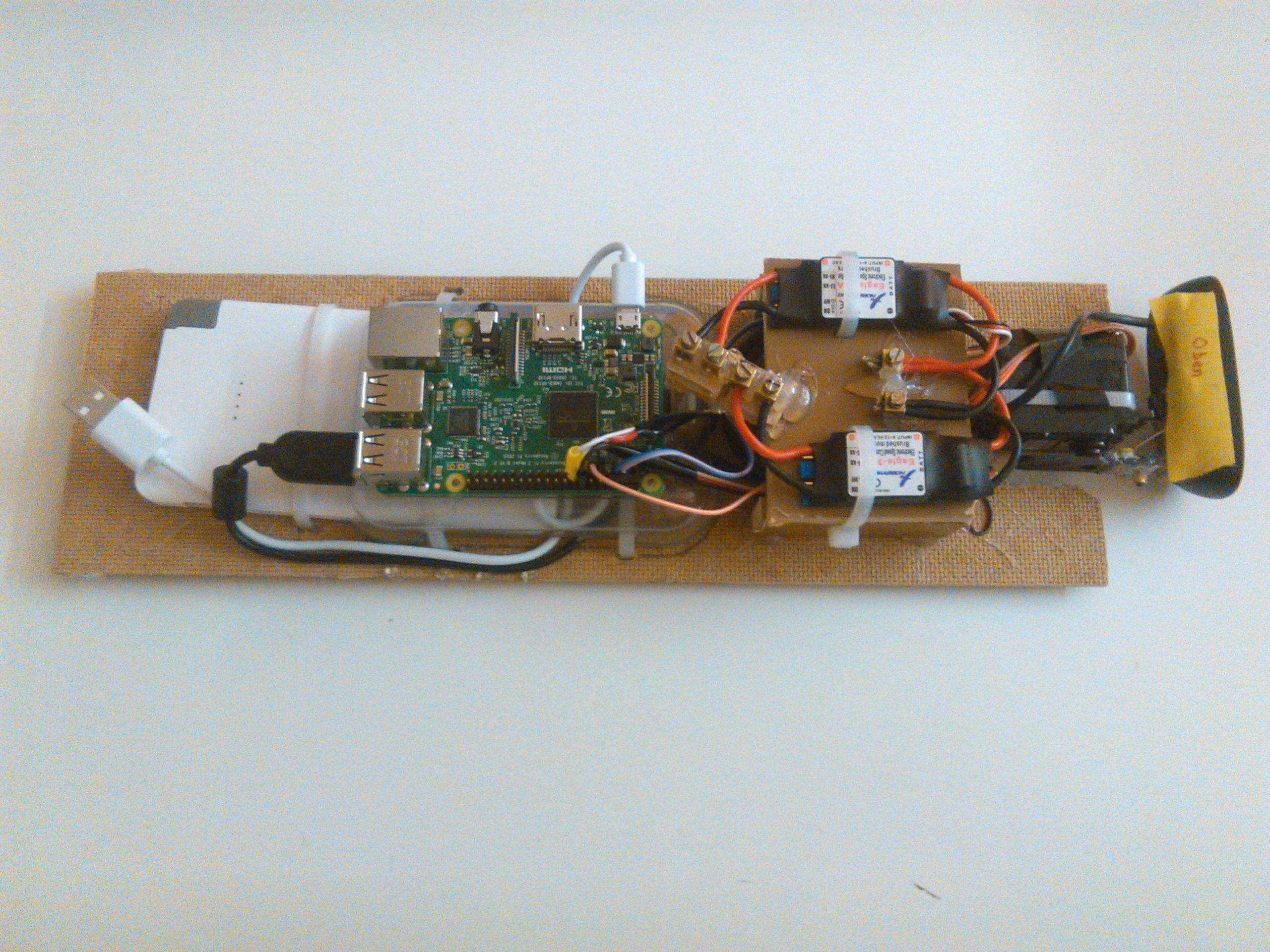
Battery and Sensor Bay 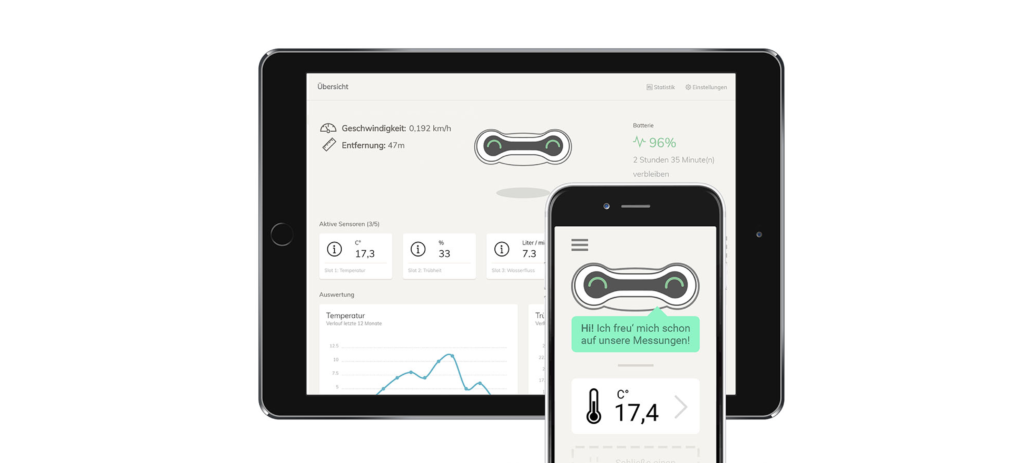
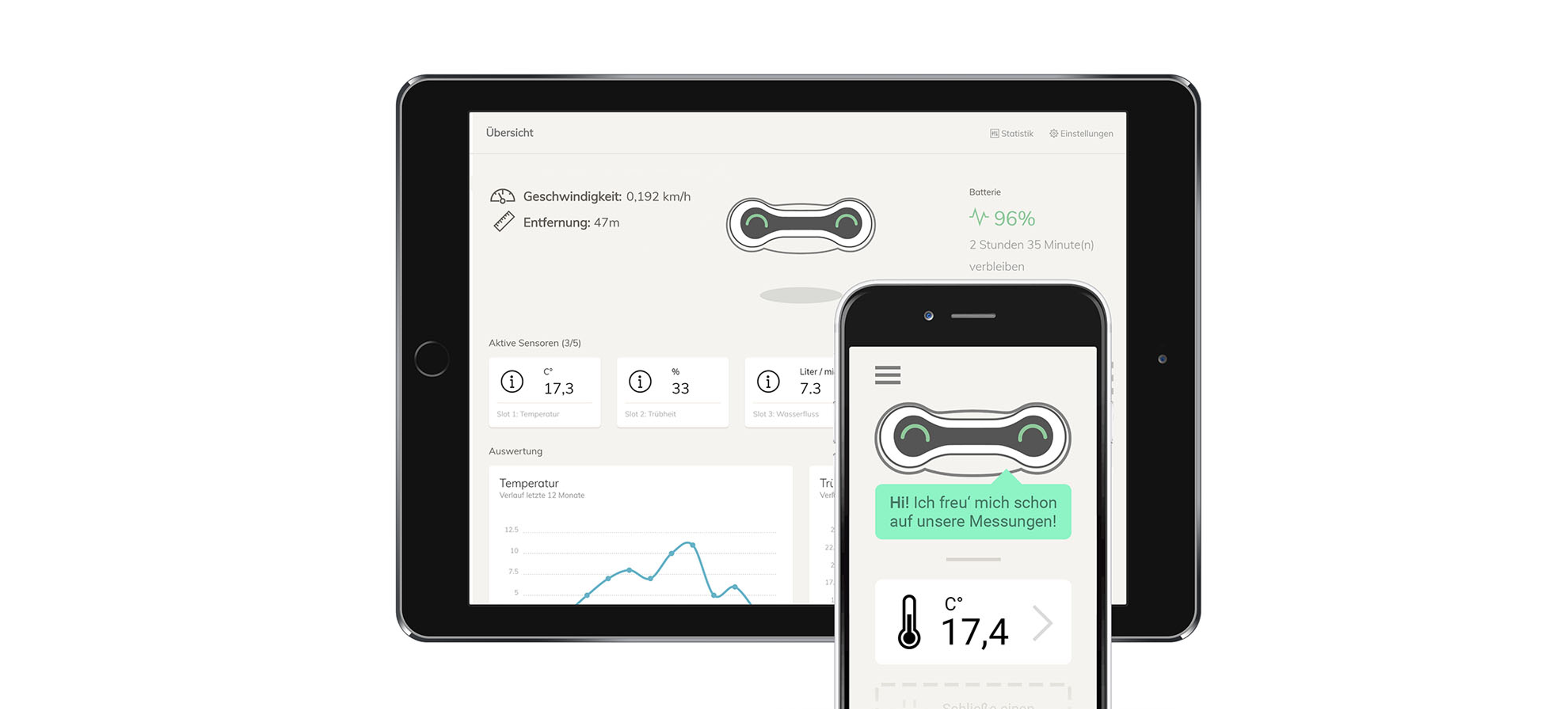
Website and App Interface 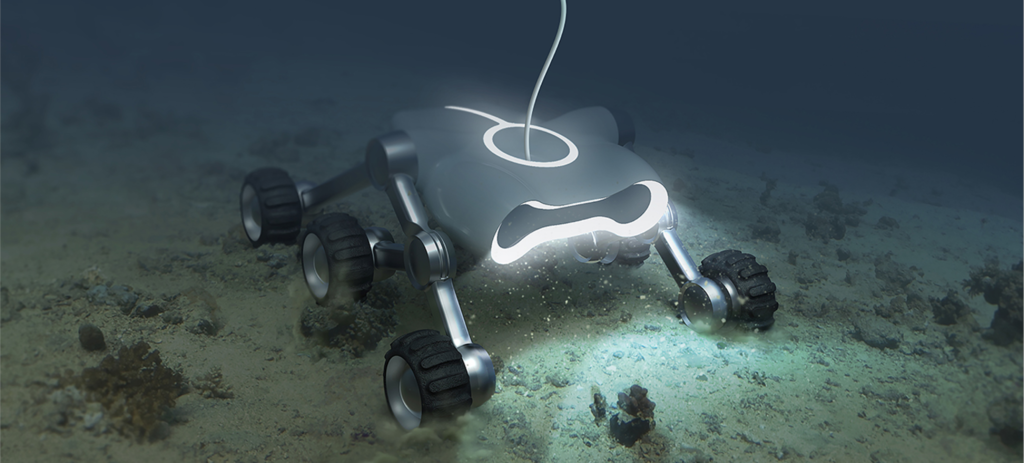
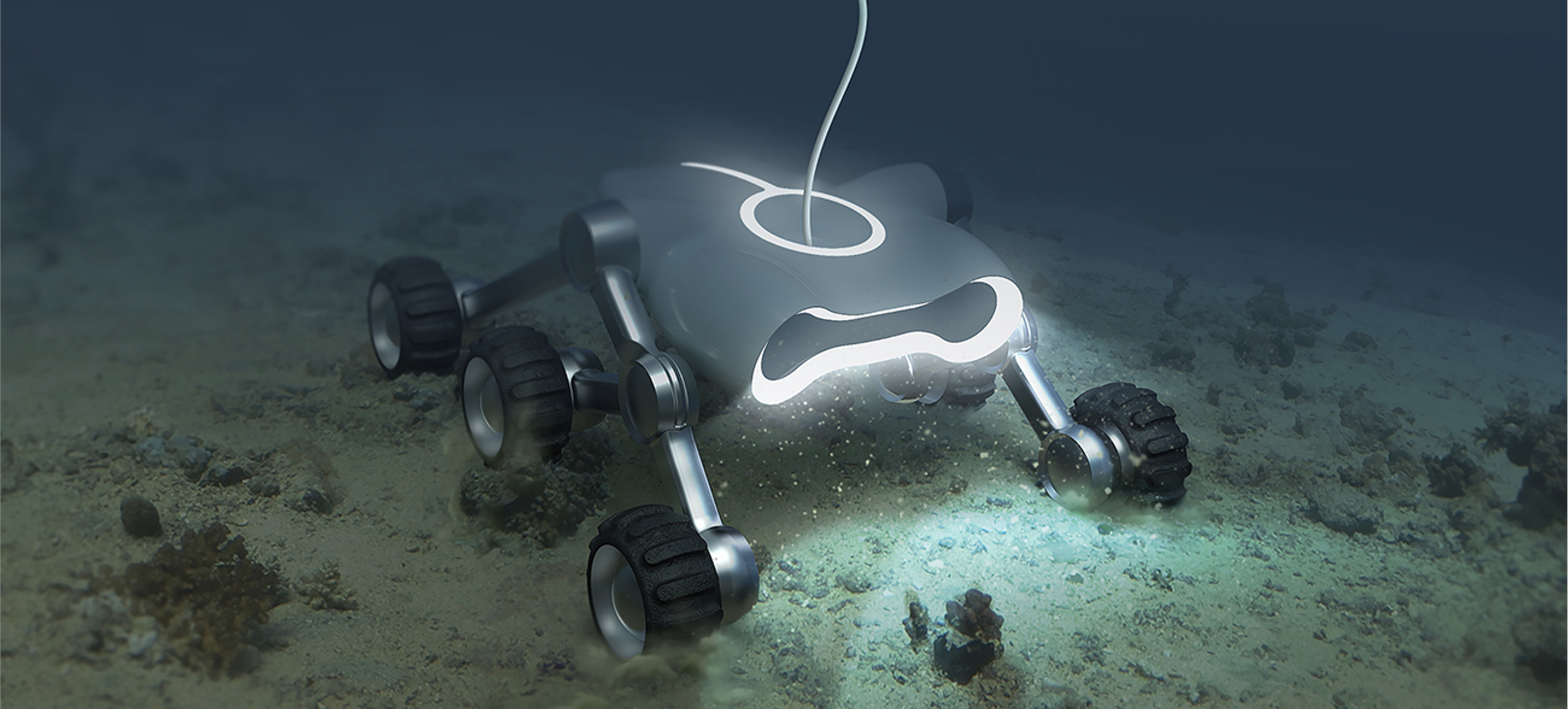
In use
Team video

Briefing
In groups of five, we were given the task to create a robot to examine the nearby brook. The robot had to comply with these targets.






Parallel Development
With only one month of time, including Christmas and New Years, we were divided into groups of five and tasked with designing product concept and building a physical model to scale. Additionally we had to create a proof of concept works like, which had to rely on the same or similar technology as our design concept and had to fulfill several goals and tasks remotely under water.
Our team started with creating a schedule to rely on and followed the „Wuppertaler Prozess“. The first critical design choice we had to make was a means of movement through the shallow Wupper. After extensive research we decided on a mars rover inspired crawler platform, which would be able to scale the difficult and rocky brook bed. A first scaled down prototype was created using building bricks and followed by a larger version in cheap wood. Having decided on the most important detail, we were also able to start generating ideas and concepts for the shape and form of the design concept.
In between design concept iterations we had to read and pick up on unfamiliar technology and skills to craft a working prototype using readily available parts and technology. Combining elements of remote controlled vehicles, plumbing pipes, common electronic components and acquiring basic programming skills, we created a remotely controlled rover that would transmit gathered data and video wireless in real time while slowly creeping over the stone bed.
The biggest takeaway from the project were the experience to work in a team under pressure, while learning new skills while creating a final design that not only looked great but also worked in principle.